This post is about equilibrium in statics – the title could cause confusion because the word “equilibrium” is used in science in several different contexts.
In post 21.15 we saw that statics describes a system that is not moving in the frame of reference of an observer – it is in equilibrium. We also saw that the vector sum of all the forces and torques acting on the system must then be zero.

In post 16.2, we saw that when we use Newton’s laws of motion to analyse a system in this way, we can’t predict unexpected events. For example, a structural engineer may calculate that a building is stable (it is in static equilibrium) but this may not be true if a plane crashes into it.
A small, unexpected force may not have much effect on dynamic stability because the resulting change in motion may be acceptable. But a static system is in an equilibrium that could be disrupted by an applied force. In post 18.8 we saw that gusts of wind could destroy a bridge if the frequency of the gusts was close to the natural frequency of the bridge. This shows that there is always a risk of a static system changing into a dynamic system – perhaps with disastrous consequences.
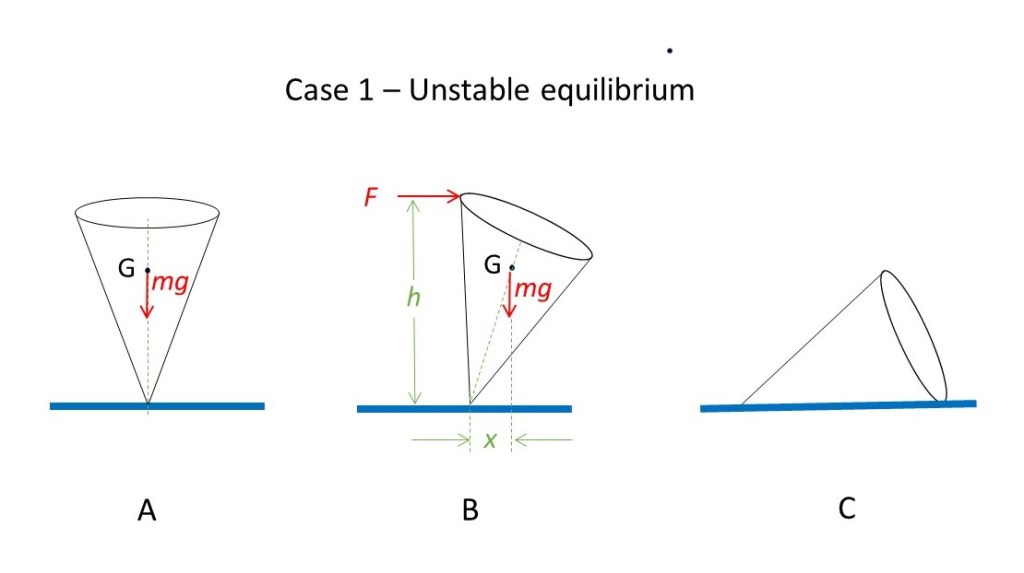
Now let’s think of a cone resting on a horizontal surface. In Case 1 the cone is balancing on its tip, as shown in part A of the picture above. The cone is in equilibrium (it does not fall over) because its centre of gravity, G, is directly above its tip as described in post 17.22 (since G is on the axis of the cone – see post 17.23). Now a force of modulus F is applied (parallel to the horizontal surface and, so, perpendicular to the axis of the cone). An applied torque of modulus Fh (h is the perpendicular distance between the line of action of the force and the horizontal surface) is generated that tends to topple the cone, as shown in part B of the picture. Now the centre of gravity is no longer over the tip of the cone. If the cone has mass m, a further torque of modulus mgx is created, as described in post 17.22. Here g is the acceleration due to gravity and x is the perpendicular distance from the line of action of the force mg to the tip of the cone. Both torques act to turn the cone in the same direction (clockwise in part B of the picture). As a result, the cone falls on to its side, as shown in part C; notice that the values of h and x change as the cone falls. The effect of the force was to change our original static system (a cone balancing on its tip) to a completely different static system (a cone lying on its side). Case 1 is an example of unstable equilibrium.
In practice, balancing a cone on its tip is usually a dynamic problem because forces can be applied to it by the wind, convection currents or vibrations. Then it is balanced by moving the horizontal surface to maintain the centre of gravity of the cone over its tip. This is an example of dynamic stability achieved by actively control, analogous to the way in which our muscles control the stability of our bodies (see post 18.9).
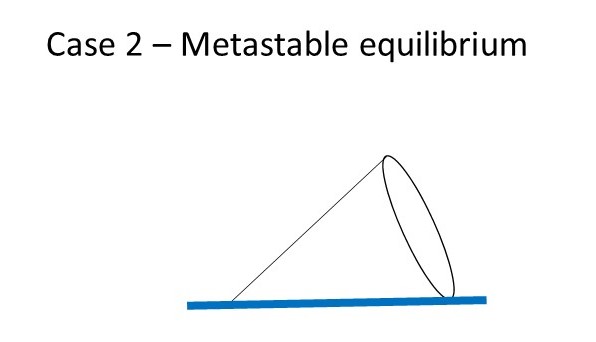
In Case 2, our cone is lying on its side on the horizontal surface, shown in the picture above. What happens when we apply a force of modulus F, parallel to the surface and perpendicular to the axis of the cone? The cone rolls to a new position – it will not roll indefinitely because of friction. It is still a cone lying on its side but in a different position. If we want to keep our cone lying on its side but are not concerned with its exact position, our system is unchanged. If we want to keep our cone in its original position, our system has moved. Case 2 is an example of metastable equilibrium.
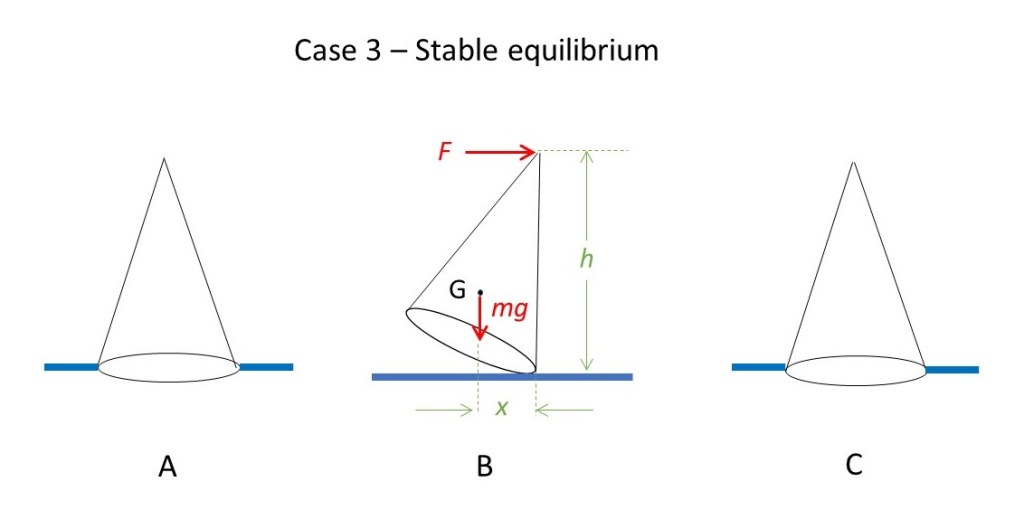
In Case 3, our cone is resting on its base, on the horizontal surface, as shown in the picture above. Now, the same force, of modulus F, is applied, in part B of the picture. An applied torque, of modulus Fh, is induced that tends to topple the cone – as in Case 1. As a result, a torque of modulus mgx is produced. Here x is still defined as the point where the cone contacts the surface – but this is no longer the tip of the cone. You can see in the picture, that this torque acts in the opposite direction to the applied torque. If the mgx is greater the Fh, the system returns to its original position. Case 3 is an example of stable equilibrium.
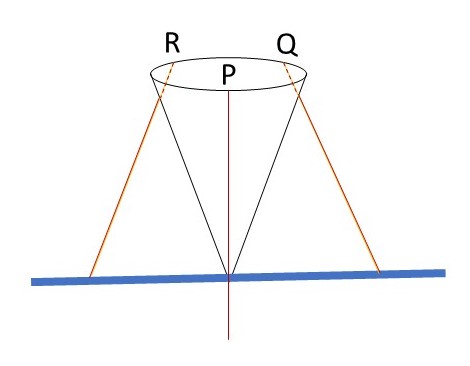
When we design a static structure, we usually want to achieve stable equilibrium. We can then try to predict unexpected forces and design our structure so that it remains stable. But we can also try to stabilise a system that is in unstable equilibrium. For example, we could stabilise Case 1 by adding guy ropes, as shown (in brown) in the picture above. If the cone starts to topple it will stretch at least some of the ropes. The tension in the stretched ropes then restores the cone to its original position. (This is explained, for tension in a spring, in post 16.49. We can stabilise our cone, resting on its tip, with a minimum of three ropes attached at points P, Q and R. A flagpole is a simple example of a static structure stabilised in the way. The designer of a static structure wants it to stay in equilibrium under a range of loading conditions.
Related posts
