Before you read this post, I suggest you read post 17.17.
In post 18.8 we saw the problems that unwanted motion of bridges could cause. Another example of unwanted motion is the sudden jolt that we experience when a vehicle goes over a bump. Fortunately, most vehicles are fitted with shock-absorbers to remove the effect of this type of unwanted motion.
When an object moves through a viscous liquid, its motion is opposed by drag forces (post 17.17). So its velocity is reduced (post 16.13) – in other words the motion is reduced. If the velocity decreases, the object must lose kinetic energy (post 16.21). When a moving object is subjected to drag, the mechanical energy is not conserved and the lost kinetic energy is dissipated into other forms of energy – usually heat (post 17.17).
Unwanted motion of an object (like a bridge or a vehicle) can be reduced by a device that involves moving something through a viscous fluid. A device of this kind is called a dashpot and its use to remove unwanted motion is called damping.
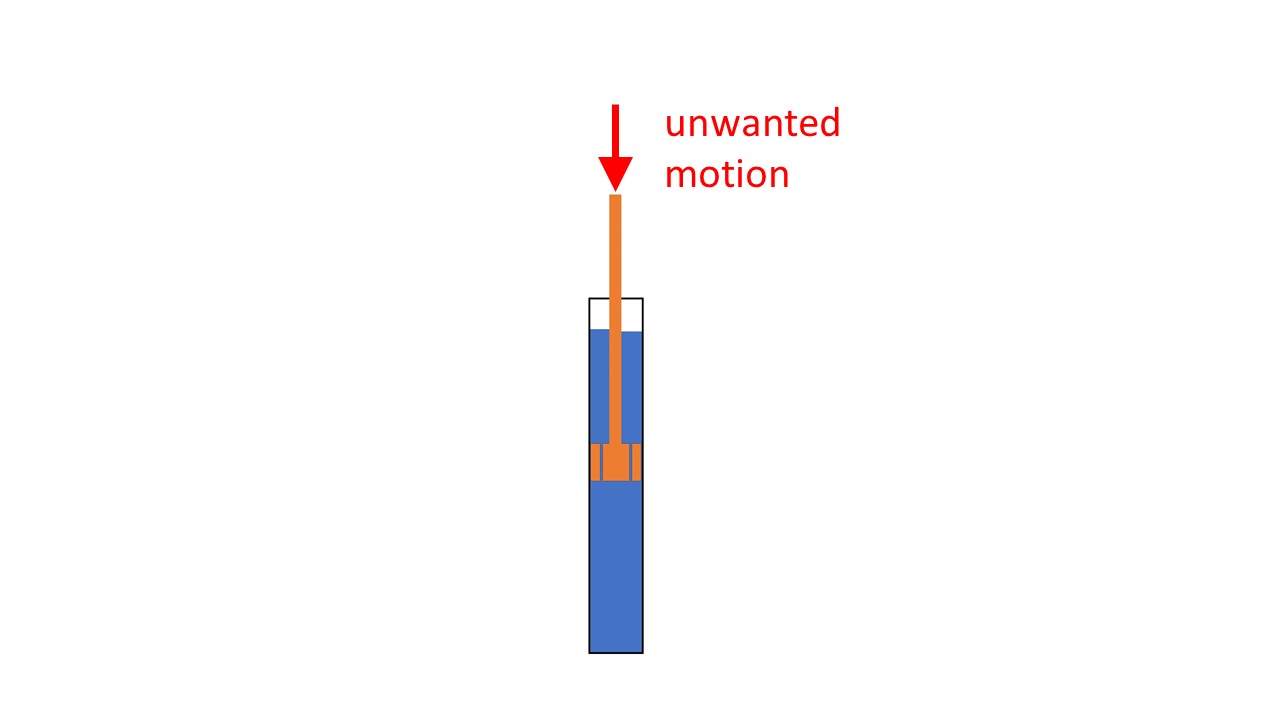
In practice, there are many designs of dashpot; the picture above shows how a simple design could work. It consists of a piston (brown) in a cylinder containing a viscous oil (blue). There are holes in the end of the piston allowing oil to flow upwards, as the piston is pushed downwards. Unwanted motion pushes the piston further down the cylinder and drag (as oil flows through the holes) dissipates its kinetic energy and so damps the motion.
Increasing the viscosity of the fluid, or the length of the holes, or decreasing the radius of the holes increases the drag force so that the piston moves more slowly (read about Poiseuille’s equation in post 17.42) – so the viscosity of the oil, and the length and radius of the holes, influences the time-scale of the motions that can be damped.
You may have noticed a flaw in the dashpot design shown above – when the piston reaches the bottom of the cylinder, the dashpot no longer works. This problem can be overcome by combining the dashpot with a spring. The spring stores some of the kinetic energy of the unwanted motion, stores it as potential energy and uses this potential energy to do work in recoil – hence returning the piston to its original position (post 16.49).

That’s why the motorcycle shock-absorber, in the picture above, consists of a cylindrical dashpot surrounded by a spring. But the stiffness of the spring is important. If it is too stiff, the dashpot will hardly move and not much mechanical energy will be dissipated. If it is not stiff enough, it will take too long to return the piston. Matching the drag force to the stiffness of the spring will be covered in a later post on control of motion.
You might have noticed that returning the dashpot to its original position wouldn’t matter if the linear motion were converted into rotational motion in a very different dashpot design.
How do we prevent unwanted motion in our bodies? Many biology textbooks state that tissues like the intervertebral disc (in the spine) and articular cartilage (that coats the ends of bones in joints like the knee) act as shock-absorbers. The idea is that fluid flow in these tissues damps motion in the same way as viscous oil in a dashpot. This isn’t true! We need to control the motion of our bodies to within fractions of a second. But fluid flow in these tissues occurs much too slowly to have an appreciable effect.
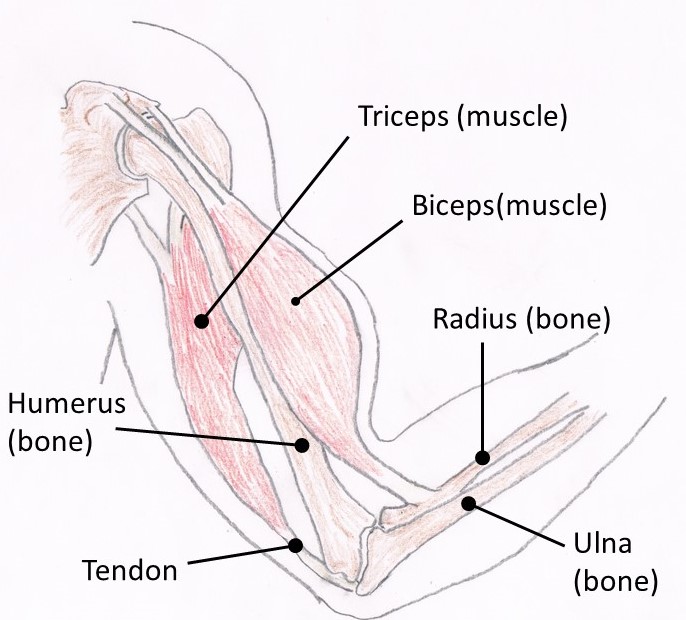
We control our movements using muscles – devices that directly convert chemical energy into mechanical energy. The picture above shows, in a simplified form, how our elbows work (note that muscles are joined to bones by tendons). To bend the elbow, the biceps muscle shortens and generates a force that bends the arm at the elbow joint. According to Newton’s first law of motion (post 16.2), the elbow would continue to bend unless acted on by another force. How do we stop the elbow bending at the instant we want it to? Many textbooks give the impression that the sole purpose of the triceps muscle is to straighten the elbow. But it can also generate a force to control the motion. So, the triceps muscle can damp the motion activated by the biceps muscle.
There is a big difference between this method of controlling motion and that of the shock-absorber. The shock-absorber responds spontaneously to the forces that act on it, without consuming any energy (like the compression and recoil of a spring in post 16.49). We call processes like this, that occur spontaneously, passive processes; the shock-absorber controls motion by passive damping. But muscles need to use energy (generated by the conversion of adenosine triphosphate into adenosine diphosphate, post 16.33) to generate a force to damp motion. We call processes like this, that require the expenditure of energy, active processes. So muscles control motion by active damping or adaptive damping.
Engineers use adaptive damping too. A sensor can be used to detect motion; for example, an accelerometer measures acceleration. A computer can read the electrical output from the sensor and make the decision to switch on an actuator, a device that uses energy (usually electrical) to induce the required motion that can be used for damping.
Related posts
18.8 Natural frequency and resonance
18.7 The simple pendulum
18.6 The pendulum
16.14 Aliasing
Follow-up posts
