It is easy to confuse the words “statics” and “statistics”. Statistics is about using numbers to test ideas and make predictions. Statics is about the forces that are acting on things that are not moving. (The study of forces acting on moving objects is called dynamics.) My simple definition of statics is easy to understand but can create difficulties about what we mean by “not moving” (see post 16.4). So it would be better to say that statics is about objects that are not moving in the frame of reference of an observer.
If an object is not moving, the resultant force acting on it is zero. Also, if it is not moving, it is not rotating so the sum of all the torques acting on it must be zero too.
We can still use Newton’s laws of motion in the same way as we do when thinking about moving objects. So, despite the impression given by many textbooks, statics is simply a special case of dynamics when the sum of all the forces and all the torques acting on an object is zero.
When an object does not move when subjected to a system of forces and torques, we say that it is in equilibrium. So a static (not moving) system is stable when it is in equilibrium. Unfortunately, many people then believe that any stable system must be in equilibrium; this is not true. In post 18.9, I explain how we can control moving objects so that they do what we want. The motion is then stable but the object is not in equilibrium. Dynamic stability (of moving objects) is not the same as static stability (equilibrium).
I have used the word “torque” in the way I have defined it in previous posts. When people write about objects that are not moving, they usually use the word moment instead. I don’t know why they make this distinction because the moment of a force is identical to a torque.
The implications of what I have written so far can best be explained by solving the simple problem given in the next paragraph.
A uniform pole of mass 1.5 kg and length 2.0 m leans against a vertical, smooth, rigid wall with its foot on a horizontal, hard, rough floor. The coefficient of static friction between the pole and the floor is 0.30. What is the maximum distance between the foot of the ladder and the floor, if the pole must not slip?
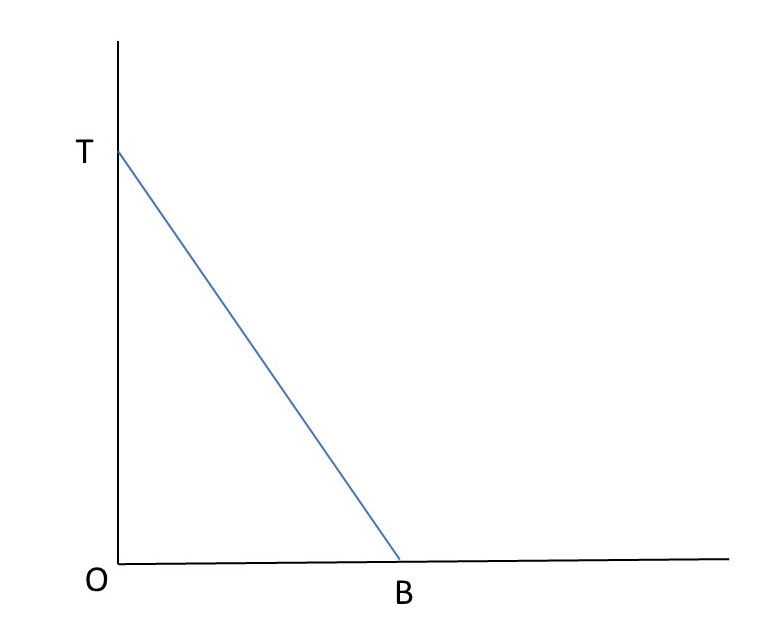
The first step in solving this problem is to draw a simple diagram of the pole resting against the wall, as shown below. Here T is at the top of the pole (shown in blue) and B is at the bottom. O is where the wall meets the floor. The angle between OT and OB is 90o. In our calculations we will represent the distance OB by x and OT by y. Then, according to Pythagoras’s theorem
x2 + y2 = 22 so that y2 = 4 – x2 (1).
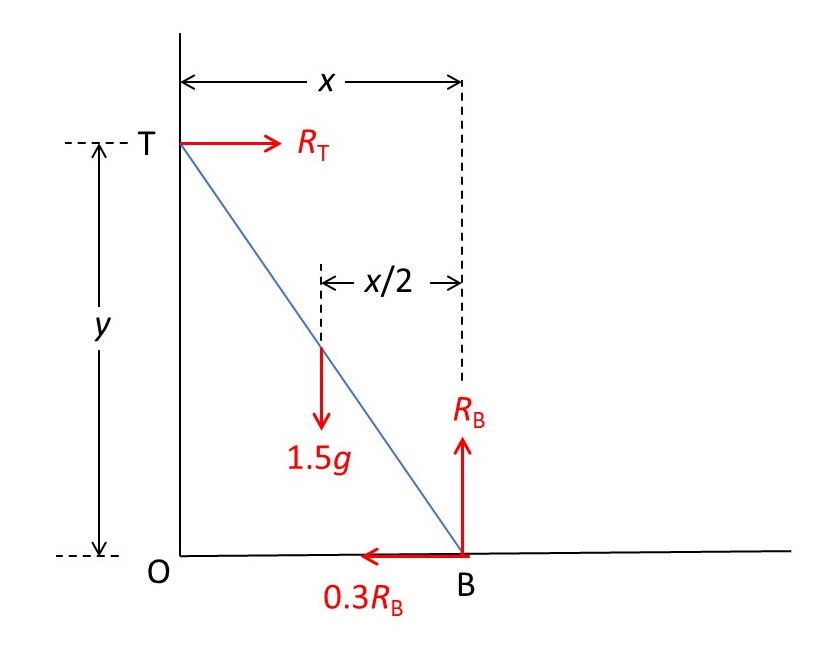
The next step is to show the modulus (in newtons) and direction (using arrows) of each force (in red) acting on the pole; the result (shown below) is called a free-body diagram; the result is shown below. The top of the pole pushes against the wall; so, according to Newton’s third law of motion, the wall pushes back with a reaction force of magnitude RT. Similarly, the ground pushes upwards with a reaction force of magnitude RB. Gravity pulls the pole vertically downwards with a force equal to its mass (1.5 kg) multiplied by the magnitude of the acceleration due to gravity (g); this force acts at the centre of gravity of the pole which is at its centre because the pole is uniform. Finally, the tendency of the pole to slide away from the wall is opposed by friction; the magnitude of the frictional force is 0.3RB because the coefficient of friction equals 0.30. Since the floor is rough but the wall is smooth, we assume that friction between the top of the sliding pole and the wall is negligible. We will assume that g = 9.8 m.s-2 because all our other numbers are given with a precision of two significant figures (see post 16.7).
I am going to solve the problem in two different ways. First, I will use vector algebra. I believe this is important because many textbooks and teachers treat forces as scalars in statics. This can confuse people (why are forces vectors in dynamics and scalars in statics?); it also reinforces the false idea that statics and dynamics are completely different subjects. Second, I will solve the problem without using vectors – for anyone who doesn’t like vector algebra.
Method 1
Let OB and OT define the x and y coordinates in an orthogonal Cartesian coordinate system; then the unit vectors, i and j, defining the directions of these axes lie in the directions shown by the green arrows, in the picture below. I can then use vector notation to define both the magnitude and the direction of the forces, in the free-body diagram below.
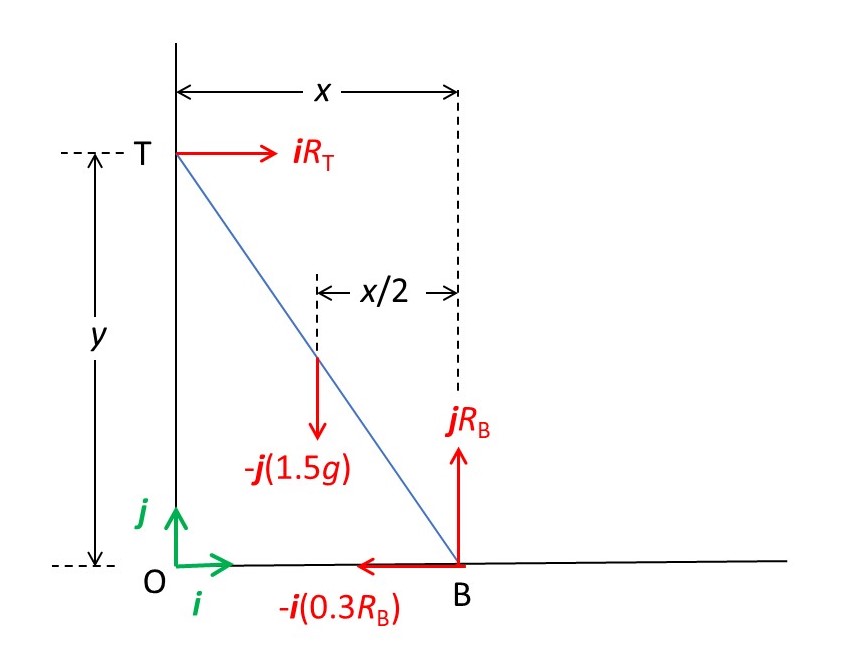
Since all the forces acting on the pole sum to zero
i(RT – 0.3RB) + j(RB – 1.5g) = 0.
And, since the i and j directions are orthogonal,
RB = 1.5 × 9.8 = 14.7 N and RT = 0.3RB = 4.41 N. (2)
Now we’ll think about the total torque tending to turn the pole about B. (We could equally well consider the total torque turning it about T; in this example it doesn’t matter because we’ll get enough equations to solve for our unknowns – as you will see soon.) As explained in post 17.37, this torque is
{-i(x/2) × [-j(1.5g)]} + {(-ix + jy) × (iRT)}.
Substituting values for g and RT (from equation 2) into this result gives a total torque of
[(-x/2)i) × (-14.7j)] +[(-xi + yj) × 4.41i] = 7.35xk – 4.41yk.
The final step is explained in post 17.37. Since the pole is in equilibrium, this total torque must be equal to zero so that
7.35x = 4.41y (3).
From equations 1 and 3
7.35x = 4.41(4 – x2)1/2
Squaring both sides of this equation gives
54x2 = 19.4(4 – x2)
so that
73.5x2 = 77.8 and x = (77.8/73.5)1/2 = 1.0 m.
The result is in metres because the only length we used in the calculation (the length of the pole) was in metres.
Method 2
The picture below is a copy of our first free-body diagram.
All the vertical components of the forces acting on the pole must sum to zero, so that
RB = 1.5g = 1.5 × 9.8 = 14.7 N. (4).
All the horizontal components of the forces acting on the pole must sum to zero, so that
RT = 0.3RB = 4.41 N. (5).
Now let’s think about the torques tending to turn the pole about B. (We could equally well consider the torques turning it about T; in this example it doesn’t matter because we’ll get enough equations to solve for our unknowns – as you will see soon.) There is an anti-clockwise (conventionally positive) torque of
1.5g(x/2) = 14.7x N.m. (6)
This scalar method for calculating torque is explained in post 17.10. The result is given in N.m because all forces are measured in newtons and all distances in metres.
The is a clockwise (conventionally negative) torque of
–yRT = -4.41y = -4.41(4 – x2)1/2 N.m (7).
The first step uses the result of equation 5, the second uses the result of equation 1. Since the pole is in equilibrium
14.7x – 4.41(4 – x2)1/2 = 0 so that 14.7x = 4.41(4 – x2)1/2.
Squaring both sides of the final result gives
54x2 = 19.4(4 – x2)
so that
73.5x2 = 77.8 and x = (77.8/73.5)1/2 = 1.0 m.
The result is in metres because the only length we used in the calculation (the length of the pole) was in metres.
Conclusions
We solved our problem by using the concepts of force and torque in the same way that they are used to explain movement. But, because the pole is not moving, the total force and the total torque must both be equal to zero. A free-body diagram usually helps in setting up the equations to solve problems in statics.
If you followed both methods for solving the problem, you will probably find the second simpler than the first. That’s because it’s a very simple problem. I think the first (vector) method is much simpler when problems become more complicated.
Related posts
20.33 Using this blog to study mechanics
17.22 Balancing
Follow-up posts
22.9 More about flying
21.16 Equilibrium
21.18 Statically indeterminate systems
