Before you read this, I suggest you read posts 17.2, 17.3 and 17.10.
In post 17.25, we saw that it is often better to introduce an idea as simply as possible and to add further sophistication at a later stage. For example, in post 16.20, the idea of work was explained by the work done by a constant force acting in a straight line along which an object could move; in post 17.36, we considered more general cases in which work had to be calculated by evaluating a line integral.
In post 17.10, torque was defined as a scalar quantity (an ordinary number – see post 16.50). We then had to think about the direction of the force to recognise whether the torque was positive (anti-clockwise) or negative (clockwise). Torque changes the angular velocity of an object. In post 17.12, we saw that vector notation can be used to represent the direction of angular velocity and angular acceleration. The vector points in the direction of the axis that an object rotates around; the direction of the vector shows the direction of the axis when the rotation is anti-clockwise (post 17.12).
In this post, we shall see how vector algebra can be used to define torque to represent its direction as well as its magnitude.
To do this we will use the idea of the cross product (sometimes called the vector product) of two vectors. In appendix 2 of post 17.13, we saw that vectors can be multiplied in two different ways. The dot product of two vectors a and b is denoted by a.b and gives a scalar result (post 17.13); we used this concept to calculate the work done by a force in post 17.36. The cross product is denoted by a × b and is defined by
a × b = (absinφ)n
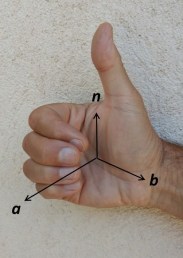
where a and b are the moduli of the vectors (see post 16.50), φ is the angle between them and its sine (abbreviated to sin) is defined in post 16.50 (appendix 3). Here n is a unit vector (that is the number 1, with no units, pointing in a specific direction – see post 17.2), perpendicular to a and b, whose direction makes a, b and n, taken in that order, form a right-handed set. What is a right-handed set? If you stick up the thumb of your right-hand and curl your fingers so that they point from a to b (as in the picture above), your thumb points in the direction of n. This is like the definition of a right-handed coordinate system in post 17.3.
Note that, in the picture, a × b points upwards but b × a points downwards so b × a = – a × b. When we form the dot product of vectors, the order in which we multiply them doesn’t matter – just like multiplication of scalars; we say that these forms of multiplication are commutative. But when we form the cross product the order of the vectors (a before b, or b before a) is important – so forming the cross product is non-commutative.
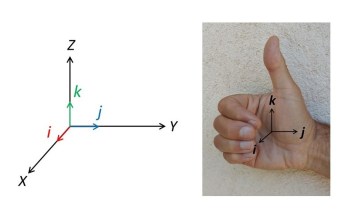
Now let’s think about the unit vectors i, j and k that define the directions of the X, Y and Z-axes in an orthogonal right-handed Cartesian coordinate system, as shown in the picture above (left-hand side, see also post 16.50 appendix 2, and post 17.3). Since an angle of 0o has a sine of zero (see post 16.50), it follows, from the definition of the cross product, that the cross product of any vector with itself is zero. So
i × i = j × j = k × k = 0.
Now look at the right-hand side of the picture above. You will see that
i × j = k, j × k = i and k × i = j.
We get this result because the modulus of i, j and k are all 1. If we form the cross products in the other order, we get the result that
j × i = – k, k × j = – i and i × k =- j.
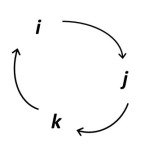
It can be helpful to think about the picture below in which we pass from i to j to k in a clockwise direction. When we form the cross product between two of the unit vectors we go round the circle, in the picture, from the first to the second; if go in a clockwise direction we get the third unit vector; if we go in an anticlockwise direction, we get minus the third unit vector.
Now let’s form the cross product between the two vectors a = axi + ayj and b = bxi + byj.

Note that a and b lie in the plane defined by i and j so that their cross product is perpendicular to this plane.
We can do exactly the same thing for three-dimensional vectors but it gets a bit messy – so I’ll show an easy way in the appendix.
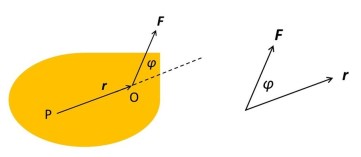
Why is this relevant to torque? The picture above (left-hand side) shows an object that can rotate about an axis that passes through P and is perpendicular to the plane of the picture. The force F acts at the point O on the object whose position, relative to P, is given by the vector r. Now the torque, T, acting on the object can be defined by
T = r × F.
This can be written as
T = (rFsinφ)n.
Now we can see that the modulus, rFsinφ, of the vector definition of torque is identical to the scalar definition of torque in post 17.10. The direction of n can be calculated by thinking of r and F acting at a common point (right-hand side of picture above) and curling the fingers of the right-hand to point from r to F (as explained above) so that the thumb points upwards, out of the plane of the paper (towards you) – so the torque tends to cause an anti-clockwise rotation.
Why make the definition of torque more complicated? Suppose we know that the force F = 3i + 4j acts at the point r = 2i – j. In what direction will the object rotate? We could try to answer this question by drawing a diagram. But it’s much easier to calculate that r × F = -11k. This type of calculation can be applied to much more complicated examples in three-dimensions to enable us to calculate the direction of rotation.
Related posts
17.29 Centrifugal force
17.24 Fields and vectors
17.13 Centripetal force
17.12 Going round in circles
17.10 Torque – using a spanner
17.3 Three-dimensional vectors
17.2 Two-dimensional vectors
Appendix
It is easy to calculate a × b if we write it as the determinant
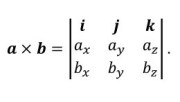
How do we calculate the value of this determinant? To make what’s happening clearer, let’s look at the coloured equations below.
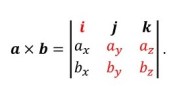
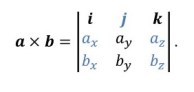
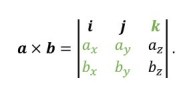
In each case, there are four coloured terms that don’t share a row or a column with the unit vector of the same colour. Now we group together the unit vector with a 2 × 2 determinant made up of terms of the same colour to expand the determinant as shown, with the unit vectors having alternating plus and minus signs, as shown below.
 To evaluate each 2 × 2 determinant, we multiply the top left-hand element by the bottom right-hand element and subtract the top right-hand element multiplied by the bottom left-hand element:
To evaluate each 2 × 2 determinant, we multiply the top left-hand element by the bottom right-hand element and subtract the top right-hand element multiplied by the bottom left-hand element:
![]()
If you want to show that this procedure gives the correct result, just go through the same process as we did for calculating the cross product of two two-dimensional vectors, in the main post, but do it for two three-dimensional vectors.
We can also use the result above to calculate a × b for two two-dimensional vectors; we just put az = bz = 0 to get
 which is the result we calculated in the main blog.
which is the result we calculated in the main blog.
With a bit of practice, it becomes very easy to do all of this in one step!
