It might be useful to read post 17.39 before you read this.

Let’s suppose we use a spring (post 16.49) to push an object (mass m – post 16.13), through a viscous liquid (post 17.17). Three things happen at once: (1) the force compresses the spring (post 16.49), (2) the force overcomes the drag force opposing the motion of the object (given by the velocity of the object multiplied by a factor M),that depends on the size and shape of the object and the viscosity of the liquid – post 17.17), (3) the force overcomes the inertia arising from the mass of the object that opposes change in its state of motion (post 16.13). If x represents the displacement (post) of the object, then we can use the information from posts 16.13, 16.49 and 17.17 to express what is happening by
![]()
Here dx/dt, differentiation of x with respect to time, represents velocity and d2x/dt2, differentiation of velocity with respect to time, represents acceleration (post 17.4).
Why don’t I represent F and x as vectors (post 17.2)? Notice that I am thinking of pushing an object along a line. Then there are two possible directions for F and x that I can represent as the positive and negative directions, and so represent F and x by scalars that have either a positive or a negative value.
Notice that the spring stores energy (post 16.49) and the viscous liquid dissipates energy (post 18.9); the mass of the object simply opposes change.
Now suppose that we use a potential difference, V (post 17.44), to push a charge, Q (post 16.25) through a capacitor of capacitance C (post 18.19), a resistor of resistance R (post 17.44) and an inductor of inductance L (post 18.21). Three things happen at once: (1) some of the work done by the potential difference pushes charge on to the capacitor where it is stored (post 18.19), (2) some of the work done by the potential difference causes the charge to flow through the resistor, dissipating some electrical energy (post 17.45), (3) some of the work done by the potential difference caused the flow of charge to overcome the effect of the inductor, which opposes change in the system (post 18.21). So, we can use the information in posts 17.44, 18.19 and 18.21 to represent what is happening by
![]()
where I represents the electrical current flowing. Since I = dQ/dt, the equation above can be written as

Equations 1 and 2 have exactly the same form and so must have the same kinds of solutions. But that’s not all. In both equations, the first term on the right-hand side represents storage of energy, the second represents dissipation of energy and the third represents resistance to change (inertia).
In the electrical system we consider that there are three components: a capacitor, a resistor and an inductor.
We can think of the mechanical system in the same was as: a spring, a dashpot (post 18.9) and an object of mass m.
This is summarised in the table below.
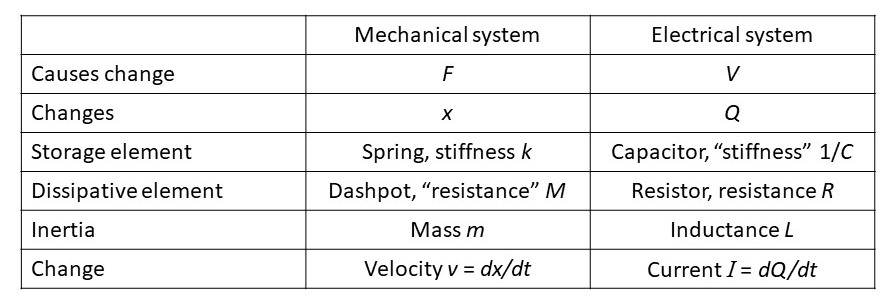
How can we use these analogies? I shall give three examples.
Example 1: in post 16.49, we saw that the energy stored by a spring when one end was displaced by a distance x was given by kx2/2. Using the analogies from the table, we see that the energy of a capacitor storing a charge Q is (1/C)Q2/2 = Q2/(2C).
Example 2: in post 16.21, we saw that when an object moves with a speed v, it has an energy mv2/2. So, when a charge moves through an inductor, it has an energy LI2/2.
Example 3: in post 18.11, we saw that an object bouncing on the end of a spring had a natural frequency of
f0 = (1/2π)(k/m)1/2.
So, we would expect the natural frequency of an electrical system to be
which is what we derived, by a different method, in post 18.23. In an electrical system, the sharpness of a resonance is given by the “quality factor” ω0L/R (post 18.23), where ω0 = 2πf0; in a mechanical system we expect this factor to be ω0m/M.
Most elementary textbooks give the impression that electrical and mechanical systems behave completely differently. But we can use the analogies between them to help us to understand how they work and to develop ideas.
Related posts
17.39 Translational and rotational motion
Follow-up posts
