Have you ever noticed that car wheels sometimes go the wrong way round in movies and on television? When a car is moving forwards, the wheels go round in a clockwise direction. But sometimes they seem to go the other way round. This effect occurs because moving pictures consist of a sequence of still pictures viewed very quickly. The movement is continuous in time but a video camera samples this movement by recording many still images with a very short interval of time between them.
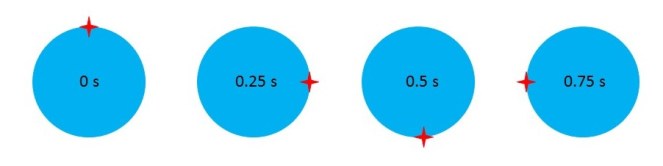
 The wheel in the pictures above is rotating once every second – we say that it rotates with a frequency of 1 hertz (abbreviated to 1 Hz). In the pictures, this movement has been sampled 4 times a second – a frequency of 4 Hz. So we see the wheel at 0 s (when we first start to look at it), 0.25 s, 0.5 s, 0.75 s, 1 s and so on. In the sequence of pictures, you can see the red marker on the wheel going round in a clockwise direction.
The wheel in the pictures above is rotating once every second – we say that it rotates with a frequency of 1 hertz (abbreviated to 1 Hz). In the pictures, this movement has been sampled 4 times a second – a frequency of 4 Hz. So we see the wheel at 0 s (when we first start to look at it), 0.25 s, 0.5 s, 0.75 s, 1 s and so on. In the sequence of pictures, you can see the red marker on the wheel going round in a clockwise direction.
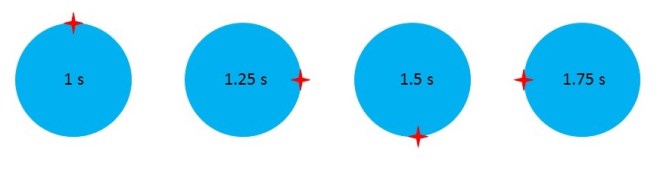
Now suppose we look at the wheel at a frequency of 2 Hz – at 0 s, 0.5 s, 1s and so on; the results are shown in the sequence of pictures below.
 The wheel is clearly moving – because the red marker moves from the top to the bottom of the wheel. But we can’t tell that it’s rotating.
The wheel is clearly moving – because the red marker moves from the top to the bottom of the wheel. But we can’t tell that it’s rotating.
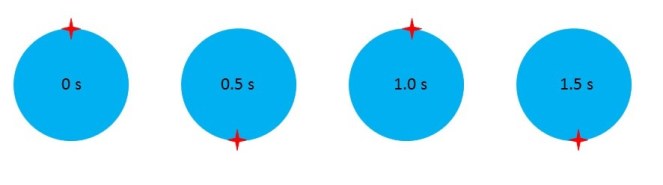
In the pictures below we’re looking at the wheel at a frequency of 1 Hz.
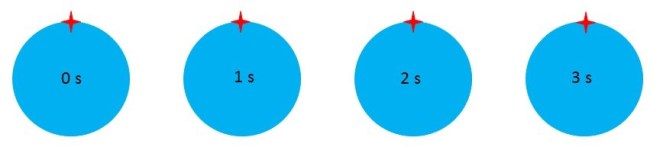 We can’t detect that the wheel is moving when we sample its movement at this frequency. All we see is a series of copies of the wheel in its original position (“aliases”).
We can’t detect that the wheel is moving when we sample its movement at this frequency. All we see is a series of copies of the wheel in its original position (“aliases”).
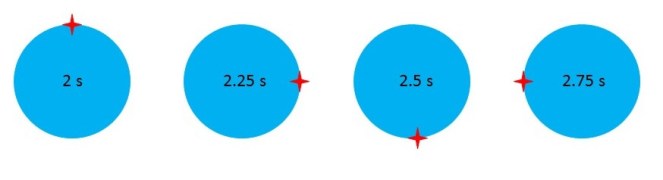
Now we’ll look at the wheel 4 times in every 3 s which is a frequency of 4/3 Hz, so the wheel is examined at intervals of ¾ = 0.75 s. The result is shown in the pictures below.
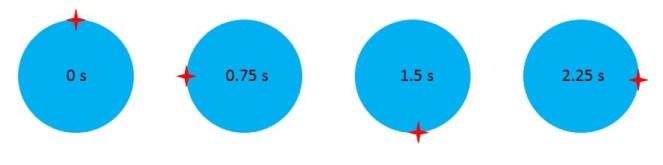 The wheel appears to be moving anticlockwise!
The wheel appears to be moving anticlockwise!
So if we want to look an object that is rotating, or going up and down, we have to examine it at a frequency that is high enough for us to detect the true motion. If our detection frequency is too low, we will simply detect a static object or an object that is moving in the wrong way – this effect is called aliasing.
From the example of the wheel, we can see that we have to sample the motion at a frequency of more than twice the movement frequency to understand what is happening. This lower limit for the sampling frequency is called the Nyquist frequency, after the electronic engineer Harry Nyquist who emigrated from Sweden to the USA as a teenager in 1907. The need to sample anything that depends on time at greater than this frequency is called the Nyquist criterion.
The recording frequency for most movies is 24 Hz (often called 24 “frames per second” or 24 FPS); so we will get a false idea of the motion of a wheel that rotates with a higher frequency. Old silent movies were recorded at frequencies as low as 16 Hz, so aliasing effects are more noticeable in them.
Aliasing and the Nyquist criterion aren’t just about wheels – they are about detecting any effect that varies with time. They are essential in a wide range of applications, including developing communications systems and detecting electrical signals from muscles (electromyography usually abbreviated to emg).
Sometimes we know the time for a complete cycle of a moving event, for example we know that our wheel makes a complete rotation in 1 s. If we denote this time period by T, the frequency, f, is defined by f = 1/T, because the frequency is simply the number of cycles that occur in 1 s. For example, 4 Hz is just another way of saying 4 times per second; in other words the time period of a complete cycle is 1/4 = 0.25 s. So we might expect to measure frequency in units called “cycles per second”. Since the number of cycles is simply a number, with no units (unlike mass or length or time, posts 16.12 and 16.13), 5 Hz is just another way of saying 5 s-1 (see post 16.12 if the idea of s-1 is not clear).
The important message is that if we want to find out about anything that varies with time, we have to detect it at a high enough frequency.
Related posts
16.8 Predictions
16.6 Exponential decay
16.5 Exponential growth
Follow-up posts
23.9 Discrete Fourier transform
17.12 Going round in circles
18.8 Natural frequency and resonance
18.9 Damping and muscles
18.10 Waves
18.11 Motion in a circle, the simple harmonic oscillator and waves
18.12 Vibrating strings
18.14 Wave shapes
18.23 Frequency response and resonance in electrical systems
