Before you read this post, I suggest that you read posts 17.12 and 17.19.
Let’s think about a particle (an object of negligible size) of mass m moving around a circle of radius r with a constant angular speed ω (see post 17.12). Its speed is given by v = ωr (see post 17.12) so its kinetic energy (see post 16.21) is given by
K = ½mv2 = ½m(ωr)2 = ½(mr2)ω2.
In the expression ½mv2, v is a linear speed and the mass, m, is a measure of inertia – the resistance to change in translational motion (see post 16.13). In the expression ½(mr2)ω2, ω is the angular speed and, by analogy with the expression for linear speed (mr2) must represent rotational inertia (also called moment of inertia) – the resistance to change in angular speed. Then we can write the kinetic energy of a rotating object in the form
K = ½Iω2
where I represents the rotational inertia. So, for a particle, we can write
I = mr2.
From the above equation, we can see that, if mass is measured in kilogrammes and distance in metres (see post 16.13), that I is measured in kg.m2.
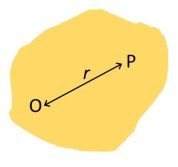
How can we calculate I for an object whose dimensions are not negligible? We consider an object that rotates about an axis that passes through a point O, at right angles to the plane of the picture above; this picture represents a slice through a three-dimensional object. Now think about an infinitesimally small part of the object at P that has a mass δm (see post 17.19 for further information on infinitessimals and the other mathematical concepts and conventions used in this post); its distance from O is r. Its rotational inertia is given by δI = (δm)r2. The rotational inertia is given, approximately, by the sum of the rotational inertias of all the elements in the object. We can write this approximation mathematically by
The approximation becomes exact in the limit δm → 0 when the rotational inertia is given by the integral
where the limits of integration are over the whole object.
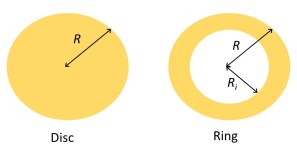
In appendix 1, we will use this result to show that the rotational inertia of a disc of radius R, rotating about an axis through its centre (and perpendicular to the plane of the disc – like a wheel rotating about its axle) is
![]()
If we cut a disc of radius Ri out of the centre of this disc, to make a ring, its rotational inertia becomes
(see appendix 1). Note that a ring has a higher rotational inertia than a disc with the same mass and radius because, on average, its mass is concentrated further from the axis of rotation.

This result is relevant to the design of a bicycle wheel. We want R to be sufficiently large that the bicycle will move a reasonable distance each time the wheel turns. But we don’t want the rotational inertia to be so high that it will offer a lot of resistance to the cyclist. To achieve this aim, the mass is kept low by making most of the wheel a ring (called the rim) that is joined to the part that rotates around the axle by spokes that have a low mass. A car wheel also has much of its mass removed around the axle, for the same reason.
In appendix 2 we see how we can use the rotational inertia of a disc to show that the rotational inertia of a sphere of radius R, about an axis passing through its centre, is
![]()
Notice that I’ve been very careful to specify the position of the axis in all these examples. That’s because rotational inertia depends not only on the mass, shape and dimensions of an object but also on the position of the axis that it rotates about.
Related posts
17.34 Turning corners
17.29 Centrifugal force
17.28 Satellites
17.13 Centripetal force
17.12 Going round in circles
17.11 Measuring angles
17.10 Torque
Appendices
Appendix 1 Rotational inertia of a disc
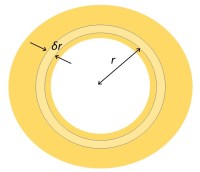
The picture above shows a ring of radius R and internal radius Ri, like that in the main blog. Let’s think of an elemental annulus, thickness δr, and radius r, within this ring. The area of this annulus is given approximately by
![]() the circumference of the ring multiplied by its width. If its thickness is t and it is made of a material of uniform density ρ (post 16.44), then
the circumference of the ring multiplied by its width. If its thickness is t and it is made of a material of uniform density ρ (post 16.44), then
![]()
So the rotational inertia of the ring is
 Evaluating this integral gives
Evaluating this integral gives
 This result can be written as
This result can be written as
 If you’re not sure why this is true, see appendix 3. By definition (see post 16.44), the density of the object is its mass, m, divided by its volume, so
If you’re not sure why this is true, see appendix 3. By definition (see post 16.44), the density of the object is its mass, m, divided by its volume, so
 Putting this result into the expression for Iring gives
Putting this result into the expression for Iring gives
![]()
When Ri = 0, this expression becomes the expression for Idisc in the main blog.
Appendix 2 Rotational inertia of a sphere
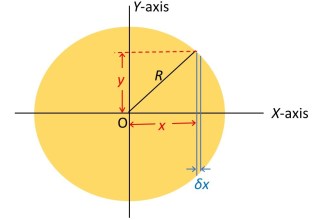
In the picture above, a sphere of radius R rotates about the X-axis of an orthogonal Cartesian coordinate system (post 16.50, appendix 2). The sphere can be considered to be a series of slices of infinitesimal thickness δx; a slice is at a distance x from O, the centre of the sphere, along the X-axis. The radius of a slice is y.
The rotational inertia of this infinitesimal slice is given approximately by![]() (see appendix 1); this is an approximation because the slice is not really a disc (see the sloping sides in the picture above) but it becomes better as δx becomes thinner. The mass of the slice is
(see appendix 1); this is an approximation because the slice is not really a disc (see the sloping sides in the picture above) but it becomes better as δx becomes thinner. The mass of the slice is
![]() where ρ is the density of the material that the sphere is made from (assumed uniform). Therefore
where ρ is the density of the material that the sphere is made from (assumed uniform). Therefore
![]() So, the rotational inertia of the sphere is
So, the rotational inertia of the sphere is
 The term πρ/4 can be placed outside the integral sign because it is a constant.
The term πρ/4 can be placed outside the integral sign because it is a constant.
In order to evaluate this integral, we note that (using Pythagoras’ theorem, appendix 1 of post 16.50)
![]() so that
so that
![]() Putting this result into the integral above gives
Putting this result into the integral above gives
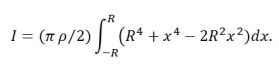
Evaluating this integral gives

We can write this result as
 where m is the mass of the sphere; this final step uses the expression for the volume of a sphere
where m is the mass of the sphere; this final step uses the expression for the volume of a sphere

This result can be obtained by integration in a similar way as an expression for the volume of a cone was calculated in the appendix to post 17.23.
Appendix 3 Difference of two squares
![]() Since
Since
![]() it follows that
it follows that
![]()
