Before you read this, I suggest you read post 20.19.
Torsion is the deformation you apply when you start to remove a screw-top from a bottle.
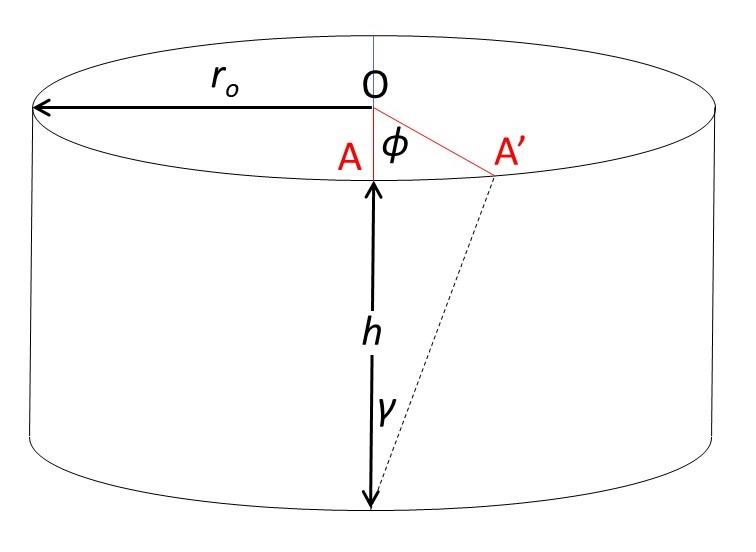
In the picture above, torsion is applied to a cylinder, with a fixed base, so that A moves to A’. O is the centre of the top face of the cylinder and defines the origin of a polar coordinate system where r represents the radial component; the maximum value of r is ro. The angular displacement AOA’ is denoted by ϕ and is called the torsion angle. According to post 20.19, γ is the shear strain for simple shear. If ϕ is measured in radians, the length of the arc AA’ is roϕ.
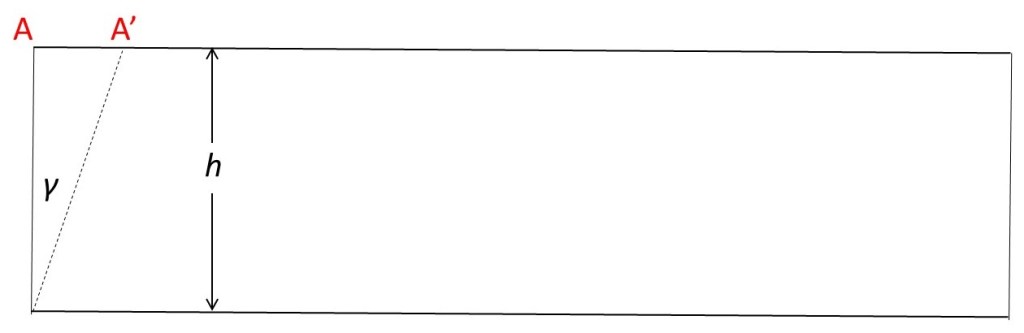
Now let’s imagine unwrapping the surface of the cylinder to give the plane in the picture above. This is analogous to creating a helix net in post 21.6. Then, from the definition of the tangent of an angle, AA’ is equal to htanγ where h is the height of the cylinder. Equating this result for the length of AA’ from the previous paragraph gives
roϕ = htanγ.
Shear strains are usually small so that tanγ ≈ γ (see appendix 1). When this approximation is valid, we can write
roϕ = hγ or γ = roϕ/h (1).
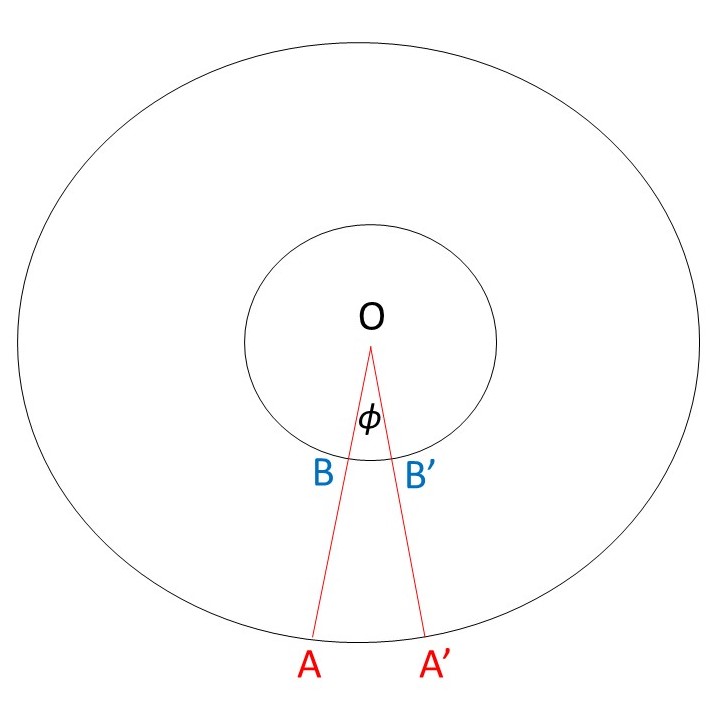
You can see, from the picture above (looking down on the top of the cylinder), that ϕ is constant for all values of r but γ increases from zero, at r = 0 (because torsion does not affect the position of O), to its maximum value, γmax, at r = ro. For example, you can see that the length of the arc BB’ is much less than AA’ so the value of γ at this radius is less than γmax. So, we can rewrite equation 1 as
γmax = roϕ/h (2).
Repeating the derivation of equation 1 for a value of r that is not equal to ro gives
γ = rϕ/h (3).
Dividing equation 3 by equation 2 gives
γ = (r/ro)γmax (4).
From the definition of the shear modulus, n = τ/γ (for small strains), where τ is the shear stress, equation 4 tells us that
τ = (r/ro)τmax (5)
where τmax is the maximum shear stress. (When I introduced shear stress in post 20.19, I represented it by σs; I have used τ here to avoid using too many subscripts.)
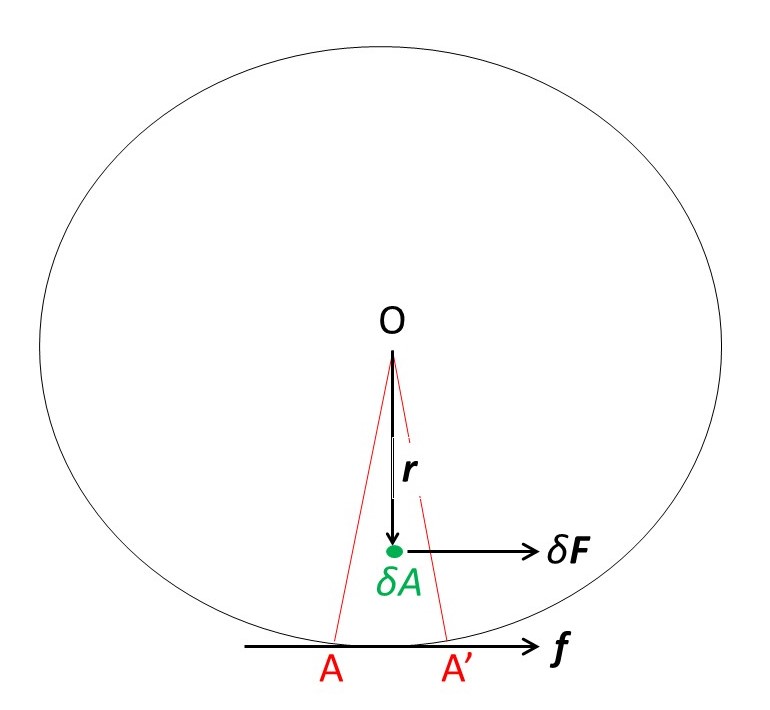
The force that applies torsion to a cylinder must act in the direction of a tangent to its circular upper surface (that is in the direction of f in the picture above) to move A to A’; this direction is perpendicular to the radius of the circle (appendix 2). Now let’s consider an elemental area δA, in the plane of this surface, and an elemental force δF applied to it, in this plane, in the direction of f. From the definition of shear stress
δF = τδA.
This elemental force exerts a torque of modulus
δT = rτδA
about O. Then the total torque acting on the upper surface is given by the definite integral

where A is its total area. The middle step comes from equation 5. J is called the polar second moment of area of the circular cross-section. Rearranging the final result gives us the equation
τmax = Tro/J (20)
that we can use to find the maximum stress in the cylinder.
For a tube of inner radius ri
J = (π/2)(ro4 – ri4) (21a)
(see appendix 3). For a solid cylinder ri = 0 so then
J = (πro4/2) (21b).
There are well established values for yield stress and ultimate tensile stress in tension. But there are no such values for the shear stresses that damage a material. As a rough guide we can assume that, for steels, the values of the stresses are about ¾ times their values in tension. So, if we want to make a cylinder that will withstand a given torque, we use equation 20 with τmax equal to ¾ the yield stress of the grade of steel we are using, to find the radius it must have if it is not to suffer plastic deformation.
Related posts
20.19 Deformation of objects – changes in shape
Follow-up posts
Appendix 1
The purpose of this appendix is to show that tanθ ≈ θ when θ is small.
In post 16.50, we defined tanθ = (sinθ)/(cosθ).
Applying the small angle approximations for sinθ and cosθ gives
tanθ ≈ θ/1 = θ.
Appendix 2
The purpose of this appendix is to show that a tangent to a circle is perpendicular to the radius drawn to the point on the circle where the tangent meets it.
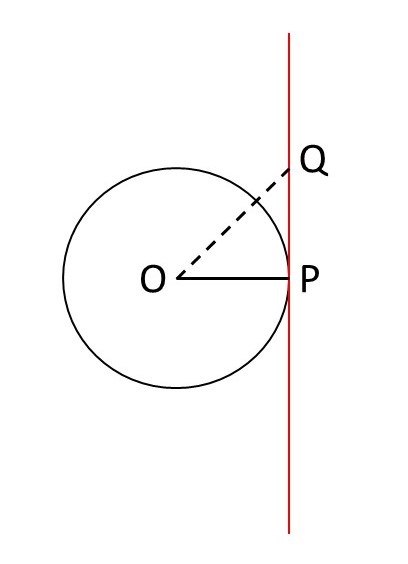
In the picture above, OP is the radius of a circle. The red line is a tangent to the circle. Any point Q on this line, other than P, must have OQ longer than OP since the tangent touches the circle only at P and Q is outside the circle. So, OP is the shortest distance between O and P. Since the shortest distance between a point and a line must be the perpendicular distance from the point to the line, OP is perpendicular to the tangent.
Appendix 3
The purpose of this appendix is to prove equation 21a.

The area, A of a circle is given by A = πr2, where r is its radius, so that dA/dr = 2πr. Substituting this result into the equation above gives

