Before you read this, I suggest you read post 21.3.

A corkscrew is used to remove corks from a bottle – see the picture above. It is made by bending a metal rod, with a circular cross-section into a shape called a helix. The centroids of all the circular cross-sections lie on a helical line that has a constant radius. The helix differs from a three-dimensional spiral because its radius is constant.

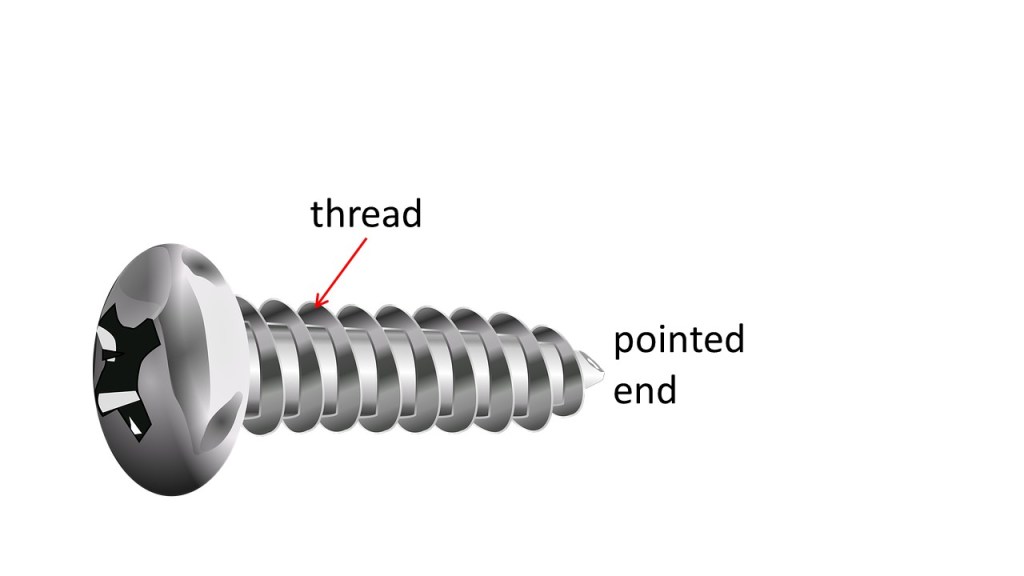
The picture above shows what we call a “spiral staircase”; but it isn’t really a spiral – it’s a helix, because equivalent points at each level of the staircase have the same radius. The thread of the screw in the picture below is a helix, except near the pointed end.
The helices in the pictures above are all right-handed. To explain what this means, we’ll define the axis of the corkscrew to be the z-axis of a Cartesian coordinate system, as shown in the picture below. In a right-handed coordinate system, when the thumb of the right hand points in the z-direction, the curled fingers point from the x to the y-axis. The corkscrew bends in the same direction – so it is a right-handed helix. A left-handed helix bends in the opposite direction – it is the mirror image of a right-handed helix, so a helix is chiral.

The picture below shows a double helix in which two helices, of the same radius, wind around the same axis. A DNA molecule is a double helix in which two polynucleotide chains have a common axis. Since the two ends of the DNA molecule are not the same, the two helices could point in the same direction (a parallel double helix) or in opposite directions (an anti-parallel double helix). However, the DNA molecule is an anti-parallel double helix. A collagen molecule is a parallel triple helix in which three polypeptide chains wind about the same axis.

Now let’s use some algebra to describe the helix. We’ll use the polar coordinates ρ, to represent a radial distance and θ, to represent an angle around the z-axis defined above. If the radius of the helix is a then
ρ = a (1).
For a right-handed helix, z increases as θ increases, in the anti-clockwise direction. We will express this in the form
z = (pθ)/(2π) (2).
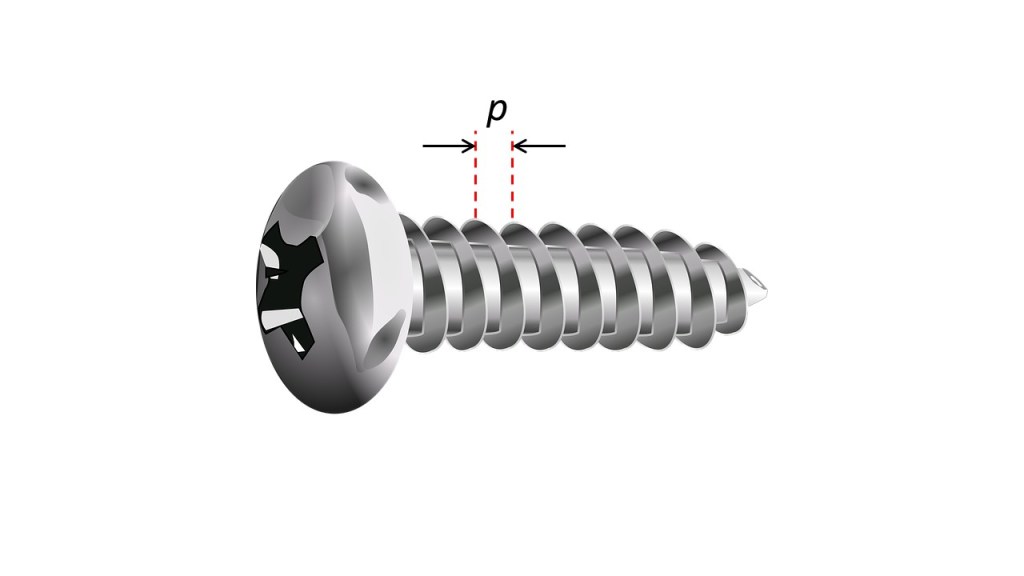
I’ve written equation 2 in this form so that p represents the increase in z every time θ increases by 2π radians, a complete turn of the helix; p is called the pitch of the helix. The picture below shows the pitch of a screw thread.
For a left-handed helix, z decreases as θ increases and equation 2 becomes
z = – (pθ)/(2π).

Now let’s think about winding the string of beads, in the picture above, into a helical path. The simplest helix of this kind is an integral helix that has an integral (whole number) of beads in a single turn. For example, a 4-fold helix has 4 beads in each turn (and, therefore, in a single pitch) of the helix. If we think of each bead as a residue in a polymer chain, the rise-per-residue (in the axial direction) for a four-fold helix is p/4. A non-integral helix doesn’t have an integral number of beads (or residues in the case of a polymer) in each turn. In the next post we’ll meet a helical molecule that is a 3.6-fold helix that has 3.6 residues per turn of helix. So equivalent points in each residue have an angular separation of 2π/3.6 radians or 360o/3.6 = 100o. The rise -per-residue of this helix is p/3.6.
A helix that has discrete objects on a helical path is called a discontinuous helix. It is sometimes useful to represent discontinuous helices in two dimensions by constructing a helix net, as described in the appendix.
Why are a corkscrew and most screw threads right-handed helices? We use a screwdriver to turn a screw in a clockwise direction if we want it to penetrate a piece of wood. A clockwise rotation decreases θ and so, according to equation 2, for a right-handed helix, decreases z – leading to penetration of the screw.
This post may tell you more than you want to know about helices. It is intended to explain the terms that I will use to describe helical molecules in later posts and some other stuff I think is interesting (but maybe you don’t). I hope that the later posts will still be interesting and/or useful even if you don’t want to understand this much detail about the geometry of helices.
Related posts
21.5 Logarithmic spirals
21.3 Polar coordinates, circles and spirals
Follow-up posts
Appendix
In a helix net we take equivalent points in each repeating unit (like the centroid of each of our beads) and plot their z values against their θ values. Below I have done this for 5 turns of right-handed 4-fold and 3.6-fold helices.
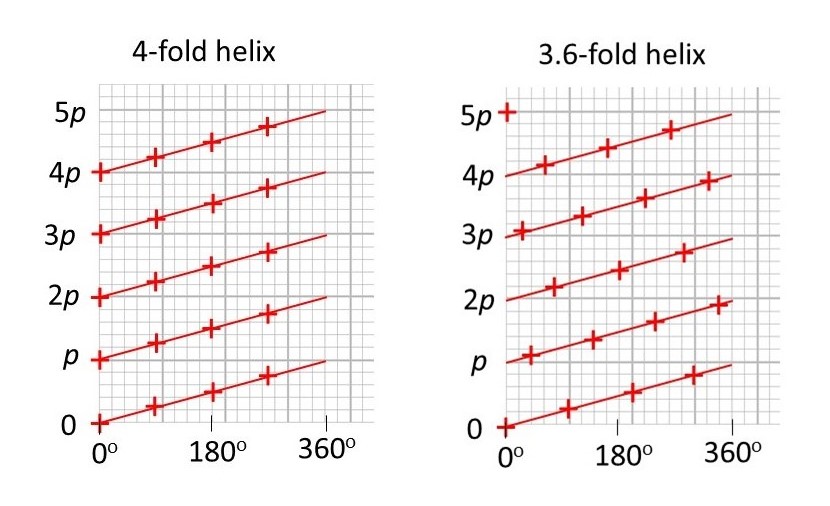
In these pictures I have defined the first point to have ρ = θ = 0. Then θ is incremented by 360o/4 (4-fold helix) or 360o/3.6 (3.6-fold helix). The value of z is calculated, as a multiple of p, using equation 2. When θ reaches 360o, I have set θ to 0 again.
You can see that the net of the 4-fold helix, like any other integral helix, is identical in each pitch. But the 3.6-fold net only repeats itself after 5 turns; in other words, it takes 5 turns for an equivalent point to be vertically above another.
The line through the points has a positive slope; for a left-handed helix, it would have a negative slope.
